


Высокоскоростной шестиосевой промышленный робот для резки металлических пластин.
TSR070-07-A Используя симметричную конструкцию рычагов, нелегко создать вибрацию. Четвертая, пятая и шестая оси имеют у
Описание
Базовая информация
| Модель №. | ТСР070-07-А |
| Использовать | 3с производственная линия |
| функция | сварка |
| полезная нагрузка | 6 кг |
| Транспортный пакет | Деревянная упаковка |
| Спецификация | ТСР070-07-А |
| товарный знак | Топстар |
| Источник | Материковый Китай |
| HS-код | 8428904000 |
| Производственная мощность | 1000 |
Описание продукта
ТСР070-07-АСимметричная структура рычагов затрудняет создание вибраций. Четвертая, пятая и шестая оси оснащены ультратонким полым редуктором, который является небольшим и изысканным и позволяет работать в небольшом пространстве.
Особая функция
Высокоскоростной
Высокая точность
Высокая стабильность
Сильная масштабируемость
Технология программного управления движением
Сочетание контроля и визуализации
Система управления шиной EtherCAT
простая установка
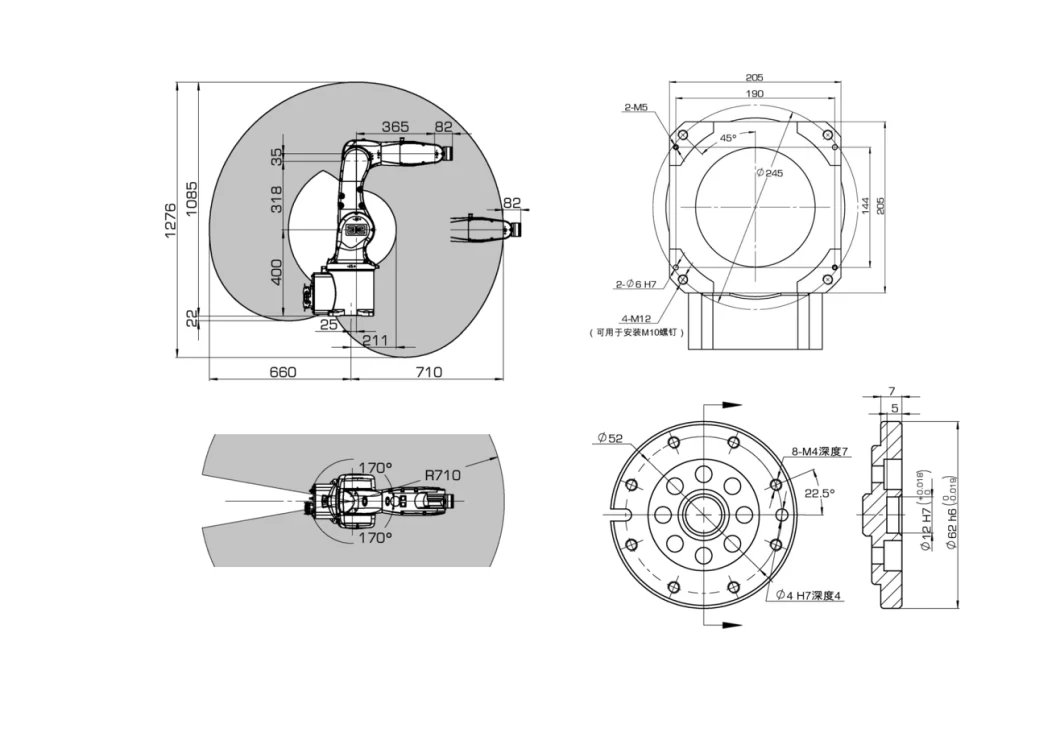
Спецификация
| Модель робота | ТСР071-06-А/ТСР070-07 |
| Форма руки | Вертикальный многосуставной |
| Свобода передвижения | 6 осей |
| полезная нагрузка | 6 кг |
| Повторите точность позиционирования | ±0,02 мм |
| Максимальный подъем | 710 мм |
| вес тела | 45 кг |
| Способ установки | Каждый угол |
| уровень IP | IP65 |
Рабочее место

Шкаф управления1. Технология управления шиной EnterCAT использует шину EnterCAT в качестве линии связи для всей системы, обеспечивая высокую стабильность, высокую скорость передачи данных, простоту подключения и легкость расширения2. Ядро WINDOWS в реальном времени ПК + ядро реального времени + технология управления программным обеспечением для обеспечения бесперебойной работы и совместимости, экономия средств на 40%3. Мощные функции моделирования: функция онлайн-моделирования в реальном времени и функция моделирования автономного программирования для защиты использования в полевых условиях, повышения эффективности программирования на 50% и снижения частоты отказов в рабочем процессе. (Уникальная система управления домашним роботом)4. Программное ядро управления движением Полностью независимые исследования и разработки алгоритмов управления движением роботов для освоения основной технологии и обеспечения постоянной конкурентоспособности на рынке без высоких затрат.

Правила
- Сосредоточьтесь на технологии сервоуправления роботами
- Функция Soft-SPS
- Обширные периферийные функции


Пред: Двухкомпонентный робот для герметизации стеклопакетов с двойной линией прямо с завода.
Следующий: Портативный портативный медицинский анализатор кожи дерматоскоп
Наш контакт
Отправить сейчас




